# SPI协议复习总结
# 简介
下面回答由ChatGPT给出,简单过一下:
SPI(Serial Peripheral Interface)协议是一种同步的串行通信协议,用于在微控制器、存储器、传感器和其他外设之间进行通信。它最初由Motorola公司开发,现在已经成为业界标准,被广泛应用于各种嵌入式系统中。
SPI协议定义了一组规则,用于控制数据在设备之间的传输。它使用四个信号线来实现数据传输:SCLK(时钟线)、MOSI(主机输出从机输入线)、MISO(主机输入从机输出线)和SS(片选线)。其中,SCLK是由主机生成的时钟信号,用于同步数据传输;MOSI是主机向从机发送数据的线路;MISO是从机向主机发送数据的线路;SS是用于选择从机的信号线。
在SPI协议中,主机负责发起数据传输,并控制通信过程。每个从机都有一个唯一的片选信号,当主机需要与某个从机通信时,会先将对应的片选信号拉低,然后开始数据传输。传输过程中,主机通过时钟信号控制数据的传输速率,同时在MOSI线上发送数据,在MISO线上接收数据。传输完成后,主机会将对应的片选信号拉高,释放该从机,然后开始与其他从机进行通信。
SPI协议具有简单、快速和灵活的特点,可以支持高速数据传输,且在硬件上实现简单,适用于各种嵌入式系统中。不过,SPI协议并没有提供错误检测和纠正机制,也不能在多主机环境下使用。因此,在实际应用中,需要根据具体情况选择合适的通信协议。
# 硬件组成
上面介绍也说了,四根线组成:
- SCLK时钟线
- MOSI主机输出从机输入
- MISO主机输入从机输出
- SS/CS片选线
一对多通信时会有多个SS片选。
# SPI时序
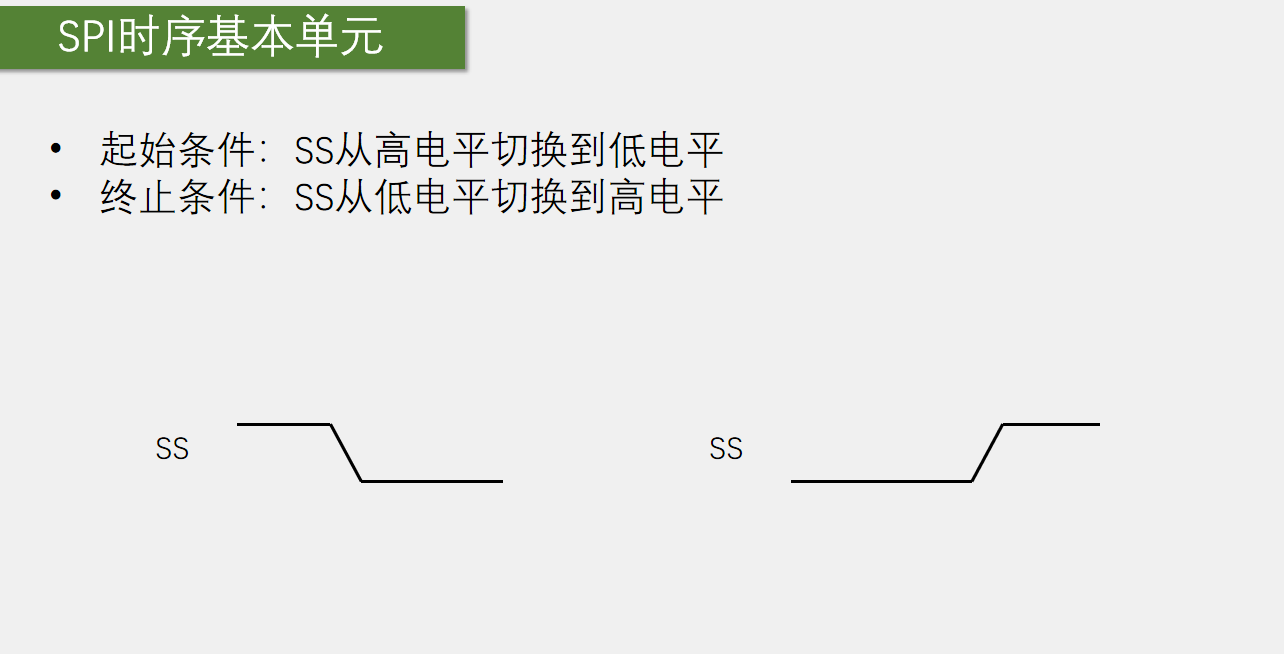
# 起始/终止条件
很简单,片选SS由高到低表示开始,由低到高表示终止。
# 时钟极性和相位极性
- CPOL 时钟极性(Clock Polarity)指的是:时钟信号在一个时钟周期内的电平变化方式。SPI中有两种常见的时钟极性:CPOL=0和CPOL=1。当CPOL=0时,时钟信号在空闲状态下为低电平,每个时钟周期开始时会出现上升沿;当CPOL=1时,时钟信号在空闲状态下为高电平,每个时钟周期开始时会出现下降沿。
- CPHA 相位极性(Clock Phase)指的是数据信号采样的时间点。SPI中也有两种常见的相位极性:CPHA=0和CPHA=1。当CPHA=0时,数据信号在时钟信号的上升沿之前改变,即在第一个时钟沿之前采样;当CPHA=1时,数据信号在时钟信号的上升沿之后改变,即在第二个时钟沿之前采样。
SPI的时钟极性和相位极性的不同组合可以实现不同的数据传输模式。
例如:
CPOL=0、CPHA=0时钟极性和相位极性的组合是SPI的标准模式;
CPOL=1、CPHA=0时钟极性和相位极性的组合是SPI的CPHA=0模式;
而CPOL=0、CPHA=1时钟极性和相位极性的组合是SPI的CPHA=1模式。
通过CPOL和CPHA的4种不同组合,可以兼容更多的硬件设备。
# 单位字节数据交换时序
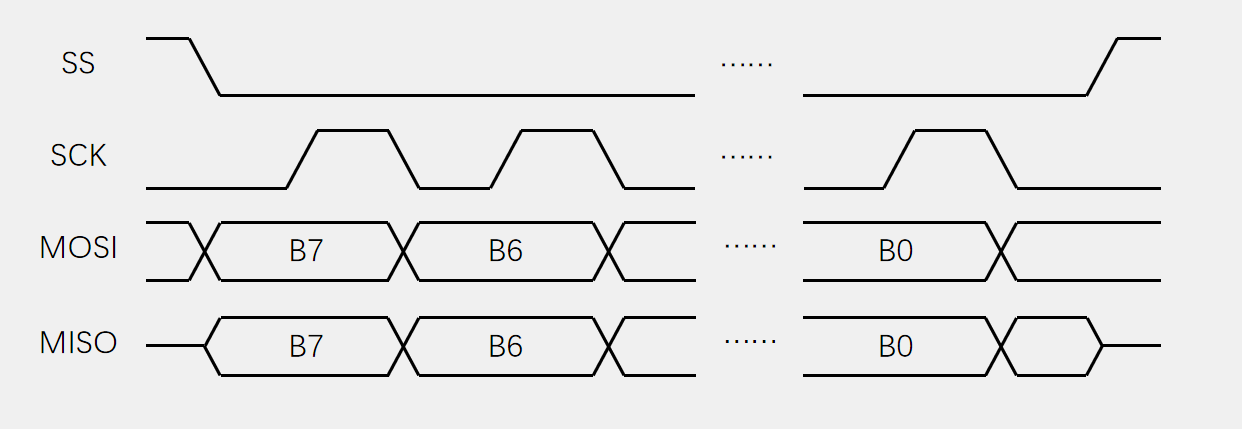
先上一张SPI单字节通信时序图,简单了解一些东西:
- MOSI和MISO数据线交叉部分表示此时线上的数据可以改变,可以为0/1;